Resultados (investigación)
Aquí se pueden encontrar algunos resultados obtenidos con el desarrollo de proyectos de investigación:
- Control de vehículos ligeros y robots móviles (enlace)
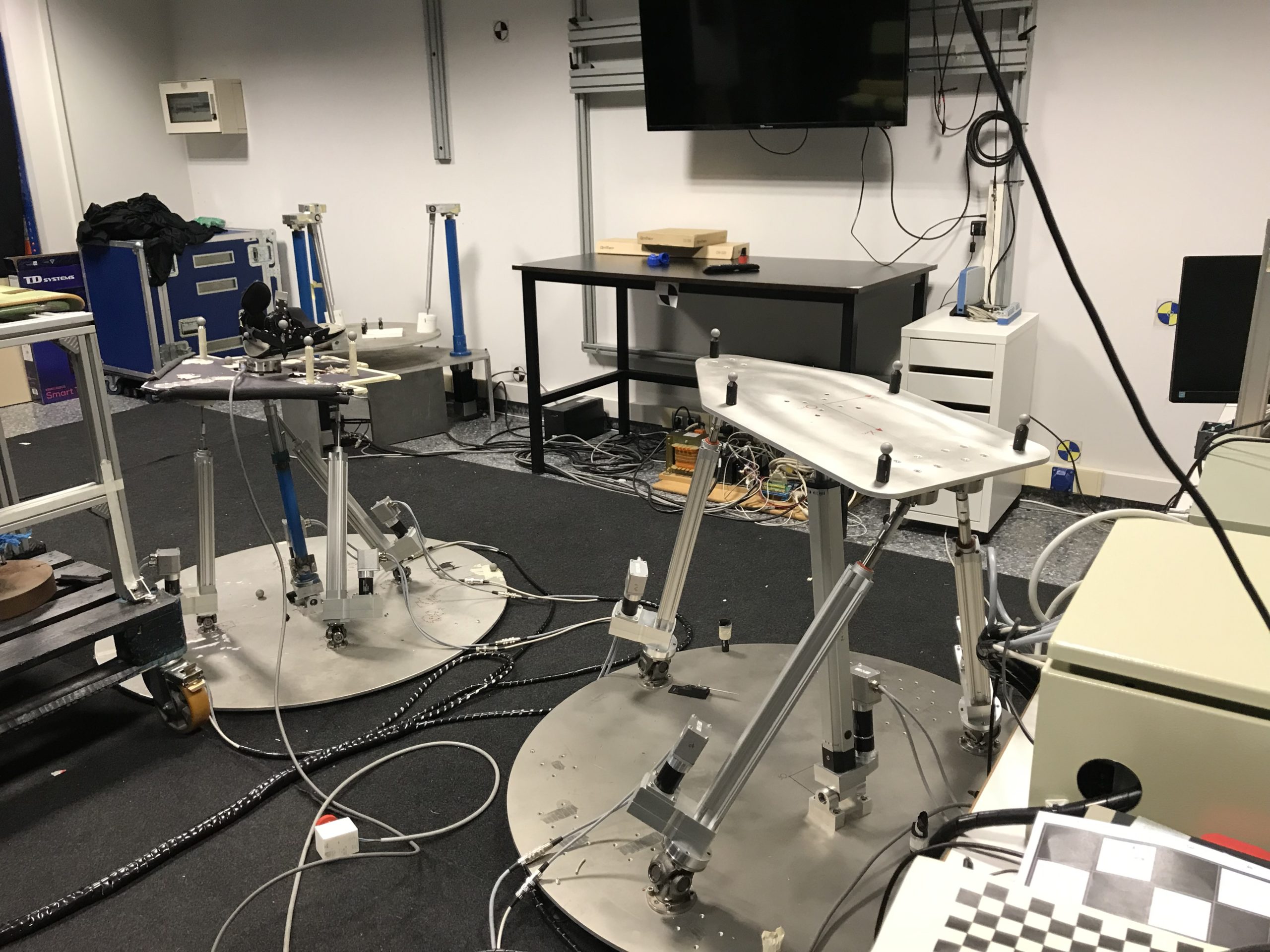
- Diseño y control de robots paralelos (enlace)
- Robots de rehabilitación: proyecto IMBIO3R (enlace)
- Robots de rehabilitación: proyecto ROBOPROP (enlace)
Otros resultados obtenidos
- Desarrollo de aplicaciones con robots colaborativos
- Diseño y control de un robot de asistencia al acto quirúrgico
- Control de robots con comunicaciones 5G
- Evitación de colisiones basado en sistemas multiagente
- Control jerárquico bandadas de robots
- Detección y seguimiento automático de personas
- Concurso Mathworks Matlab_Arduino
- Aplicación pick&place industrial basada en visión artificial y conveyor tracking
- Arquitectura abierta de control de un robot PUMA